非标设备定制——无人化包装仓储产线
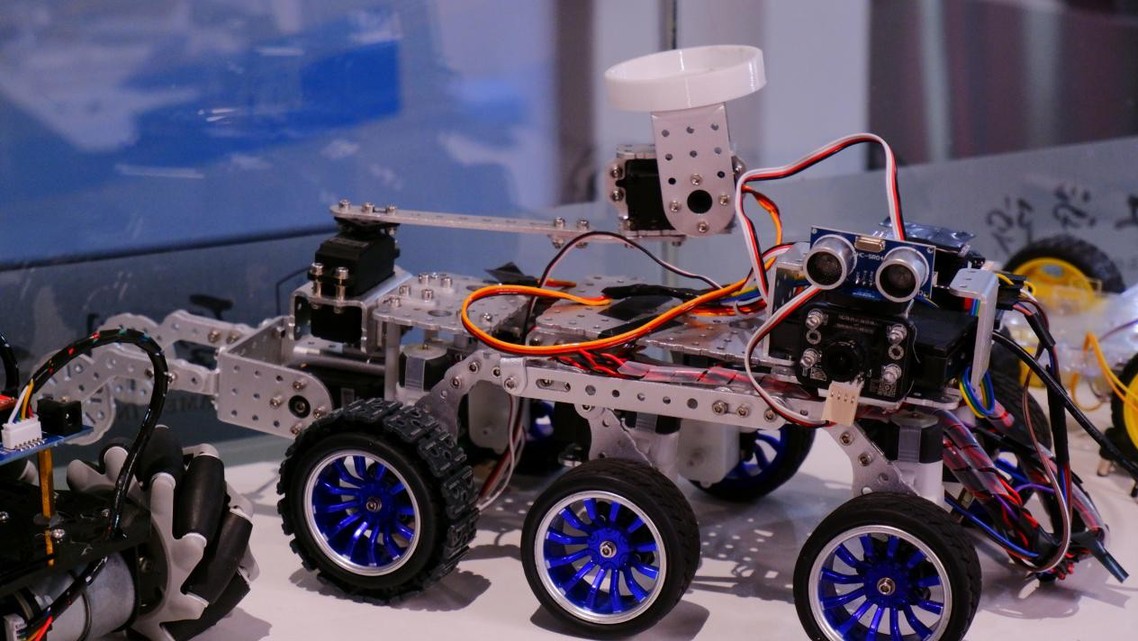
作品简介:本作品采用了255号底盘,搭载了“被动摇臂”型的6轮6驱结构,赋予了它出色的牵引力和稳定性。控制方面,集成了传感和视觉技术,可实时分析周围环境,精准识别卡片和载盘标识色。经过多次试验与调试,我们调整了底盘的悬挂系统,以增强越障过程中的稳定性,同时优化了动力分配算法,使小车在加速和爬坡时更加迅捷。
学生团队:余烊,马贺悦
指导老师:陈珍姗,高丽贞
智能物料搬运agv机器人

作品简介:智能物料搬运 AGV 机器人集成 SLAM 导航、激光雷达避障与视觉识别技术,以高精度伺服电机驱动,搭载自主研发路径规划算法,灵活避让障碍物,精准定位目标站点。支持 WiFi/5G 远程调度,可通过管理系统实时监控运行状态,实现多台 AGV 协同作业,大幅提升仓储物流、生产线转运效率,广泛应用于智能制造、电商仓储等场景。
学生团队:陈思高
指导老师:陈珍姗,高丽贞
智能物流搬运小车
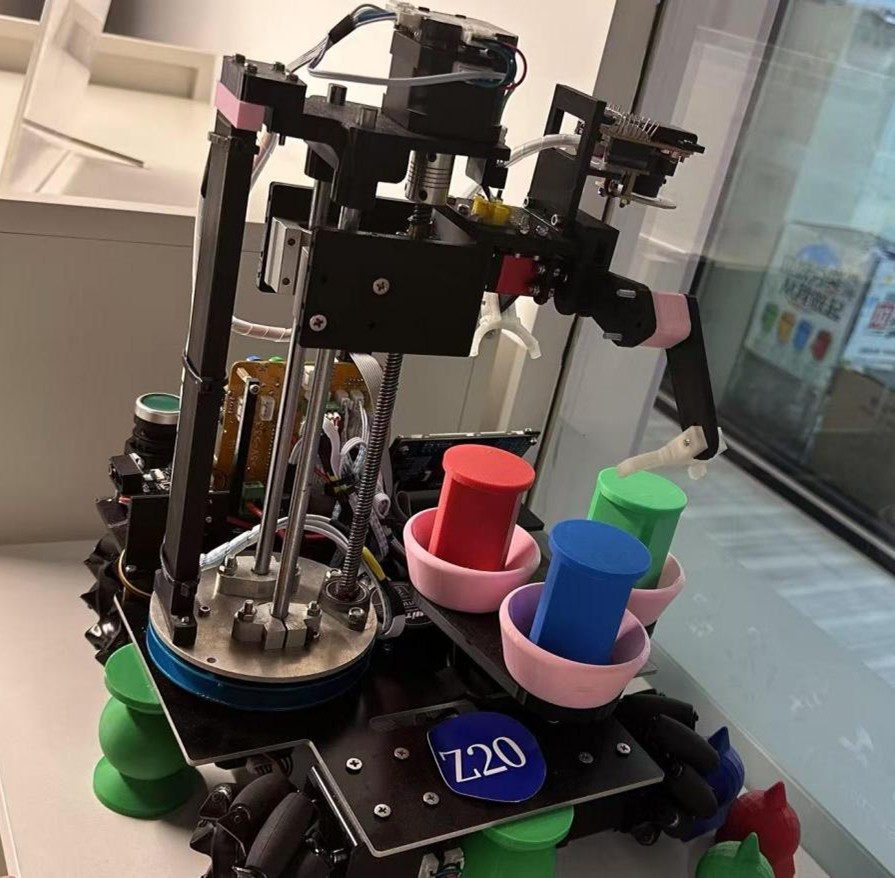
作品简介:本作品是基于STM32,通过机械结构设计确保稳定运行与精准抓取,利用Open MV摄像头来感知物料位置、场地环境等信息,且搭配了智能算法规划最优路径,能够适应各种复杂的场地和任务要求,实现高效物流搬运。
学生团队:余烊,吴思嵘,潘博洋,许烨
指导老师:陈珍姗,苏河星
平衡车机器人
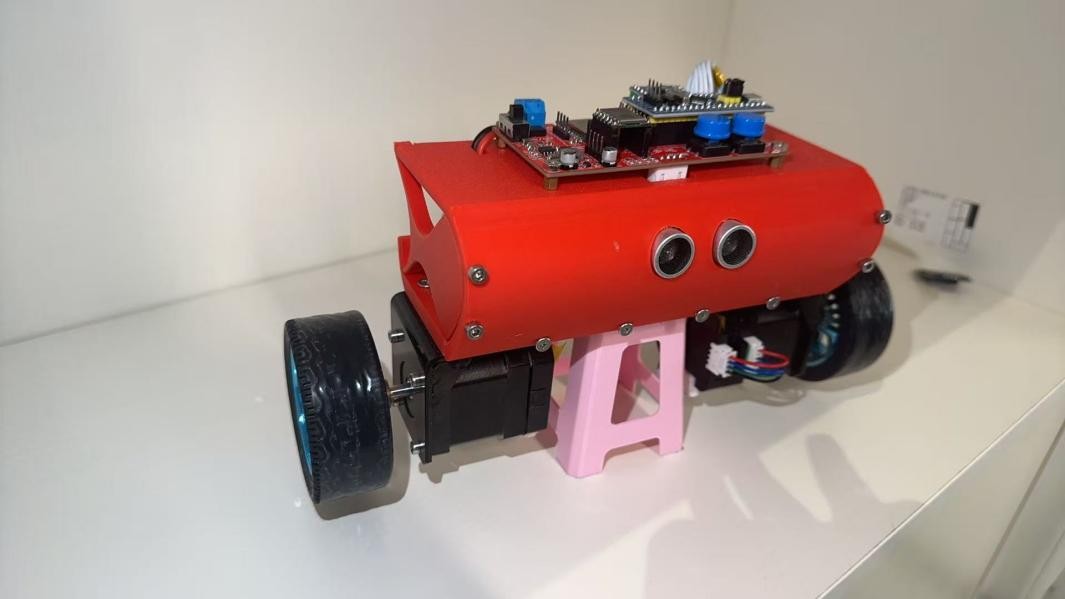
作品简介:本作品以 STM32 为主控核心,深度集成 PID 控制算法、FreeRTOS 实时系统、CAN 总线及高精度陀螺仪,并搭载 WiFi 无线控制模块。PID 算法与陀螺仪实时联动,快速响应姿态变化实现精准动态平衡;FreeRTOS 保障多任务并行高效运行,CAN 总线确保数据零延迟、高可靠传输。用户可通过手机 APP 即可远程操控。
学生团队:吴思嵘
指导老师:陈珍姗
三子棋游戏装置
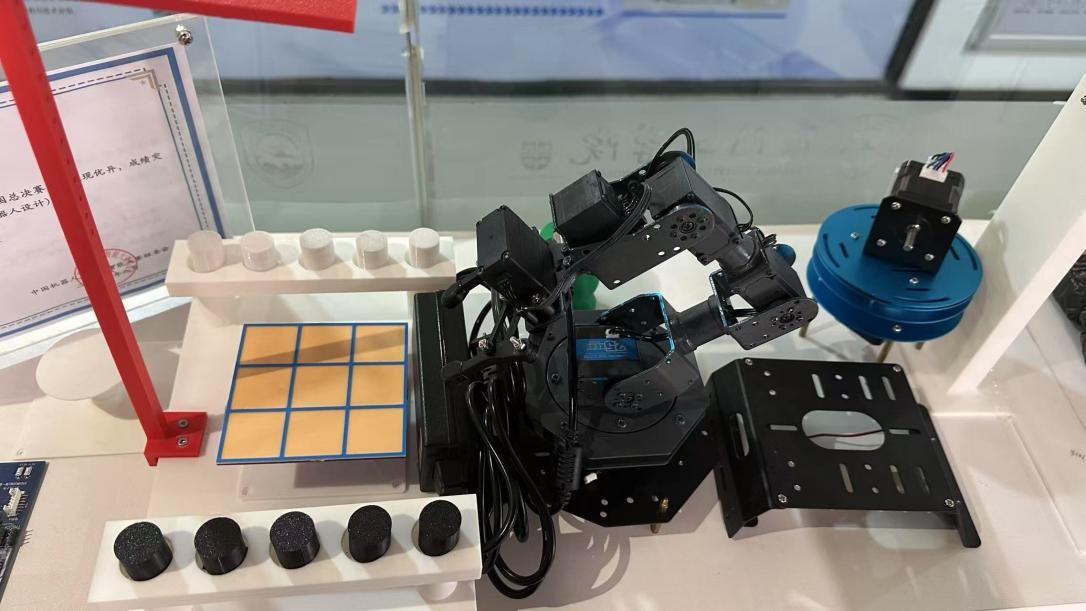
作品简介:本作品通过Open MV对棋盘与棋子进行识别,获取棋盘位置以及棋局情况。STM32 接收Open MV数据,对控制由精确舵机系统构成的机械臂,稳定抓取棋子并实现人机对战 。
学生团队:余烊,潘博洋,许烨
指导老师:陈珍姗
智能分拣工作站

作品简介:本设计搭建了一款融合PLC、工业机器人、机器视觉等技术的智能分拣工作站,基于西门子PLC与四轴工业机器人相结合,配合机器视觉与HMI用户交互界面,用户可在HMI屏幕中进行选择下单,点击执行之后,智能分拣工作站会结合机器视觉与机械臂进行物料的识别,抓取,搬运,分拣等一系列复杂工作,实现物料分拣到入库,出库等全自动化流程,基于智能分拣工作站的创新,能够实现基于不同定制化需求的用户订单的智能分拣,可替代人工完成识别、分拣的工作,显著提高了工作时的生产效率与生产产品的质量。
学生团队:王杰
指导老师:陈珍姗,廖耿斌
智能化工业物联场景升级改造
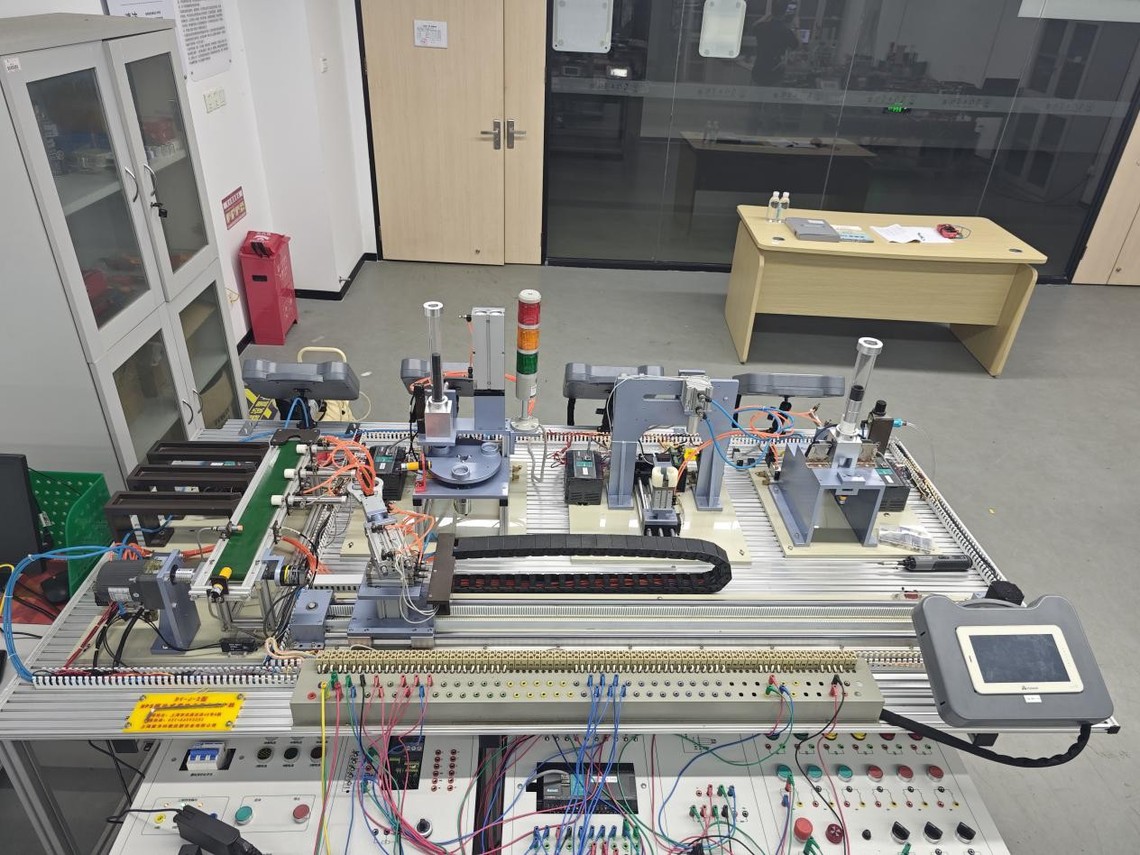
作品简介:本设计基于海为PLC进行自动装配产线智能化改造,旨在通过优化控制流程、集成先进技术,提高产线的生产效率、产品质量和设备可靠性。通过硬件选型、软件设计、系统集成与测试等环节,实现产线的自动化控制升级和智能化水平提升。
学生团队:郑鑫宏
指导老师:陈珍姗,廖耿斌
